|
Козловые краны
В путевом хозяйстве козловые краны применяются на открытых площадках звеносборочных баз, погрузочных площадках дистанций пути, шпалопропиточных заводах для погрузки, выгрузки и транспортирования в пределах площадки различных материалов, и прежде всего материалов верхнего строения пути – рельсов, скреплений, шпал. Основное достоинство этих кранов – простота изготовления и эксплуатации.
Независимо от конструкции козловой кран (рис. 1) состоит из моста в виде фермы 1 (балка, труба), опирающейся через опоры 2 с тележками 3 на подкрановые пути. На мосту козлового крана установлена и может перемещаться по нему крановая тележка 4 или тельфер, оснащенные грузоподъемным механизмом, к которому подвешивается груз 5.
Мост (ферма) козлового крана может иметь одну или две консоли, но может быть и без них. В связи с этим краны разделяются на консольные и бесконсольные. Кабина управления краном размещается на опорах или ферме, что обеспечивает крановщику хороший обзор.
К основным параметрам козлового крана относятся: грузоподъемность Q, пролет (расстояние по горизонтали между осями подкрановых путей) L, длина консоли (расстояние между осью рельса подкранового пути и центром зева крюка грузоподъемного механизма, находящегося в крайнем положении) Lк, максимальная высота подъема крюка H. Скорость подъема груза козловыми кранами находится в пределах 8–16 м/мин, а скорость передвижения крана – 20–100 м/мин.
Козловые краны пролетом 32 м и выше называют перегрузочными мостами. Они предназначены для обслуживания больших площадей, например открытых складов сыпучих грузов. Козловой кран обслуживает площадь, ограниченную пролетом моста, консолями и длиной подкранового пути. Пролет козлового крана может перекрывать два и более железнодорожных пути.
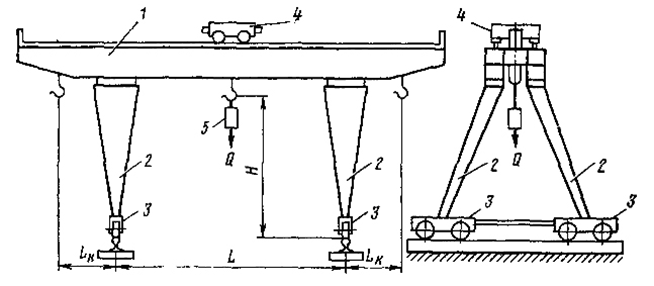
Рис. 1. Схема козлового крана
ГОСТ 7352–81 на козловые краны распространяется на краны грузоподъемностью 3,3–32 тонны с пролетом 10–32 м и предусматривает выпуск кранов типа ККТ с тельфером (электроталью) в качестве механизма подъема и КК с грузовой тележкой.
Таким образом, грузоподъемным механизмом козловых кранов являются грузовая тележка (при Q > 5 т) или тельфер (Q < 1,5 т).
Примеры условных обозначений кранов:
1) ККТП-5-16-8-0,125-0,32-0,8 (ГОСТ7352–81) – козловой кран с управлением с пола (П), с талью грузоподъемностью 5 т, пролетом 16 м с высотой подъема крюка 8,0 м, скоростью подъема крюка 0,125 м/с, скоростью передвижения тали 0,32 м/с, скоростью передвижения крана 0,8 м/с;
2) КК-2-20/5-32-10-0,2/0,5-0,8-1,0 (ГОСТ 7352–81) – козловой кран (исполнение 2), с тележкой грузоподъемностью главного подъема 20 т и вспомогательного 5 т, пролетом 32 м, высотой подъема 10 м, скоростью подъема главного крюка 0,2 м/с, вспомогательного 0,5 м/с, скорость тележки 0,8 м/с, скорость крана 1,0 м/с.
Краны, спроектированные ранее, имеют другие обозначения. Так, на транспорте используют двухконсольные 5-тонные краны КД-05 и КД-09, двухконсольные 10-тонные краны КДКК-10, ККС-10 (самомонтирующиеся). В путевом хозяйстве широко применяются 5 и 10-тонные краны.
Козловой кран КДКК-10 (рис. 2) состоит из фермы 2, опирающейся на опоры 8 типа козловых. По ферме перемещается крановая тележка 1 с грузоподъемным механизмом. Ферма имеет две консоли 6. Опоры 8 смонтированы на ходовых тележках 9, перемещающихся по рельсам подкрановых путей посредством механизма передвижения. Двигатели крановой тележки питаются током по кабелю 3 от троллеев 5. Для ремонта тележки служит балка 4 с талью. Опоры имеют распорные балки 10, а также кабину управления 7. На специальной площадке смонтирована пускорегулирующая аппаратура 11.
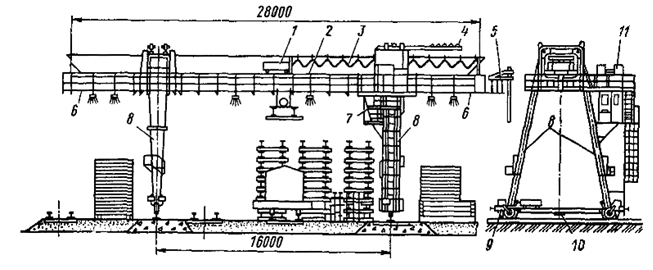
Рис. 2. Двухконсольный козловой кран КДКК-10
Для погрузки и выгрузки рельсов, шпал и рельсовых звеньев применяется кран КПБ 10 (кран путевых баз), который состоит из двух 10-тонных кранов КДКК-10, соединенных жесткими штангами и управляемых из одной кабины.
Крановая тележка имеет механизмы подъема груза и передвижения тележки. У крана КДКК-10 (рис. 3) механизм подъема груза представляет собой грузовую лебедку. Он включает двигатель 14, муфту 13, тормоз 4, редуктор 12, грузовой барабан 3, полиспаст 1 с рычагом ограничителя подъема груза 5, обойму с крюком 6. Механизм передвижения тележки состоит из электродвигателя 8, редуктора 10, муфты 9, колес 2 и тормоза 7. Для подачи электроэнергии к электроприводу тележка имеет кабель, наматываемый на специальный барабан 11.
На кинематической схеме механизма подъема груза (рис. 4, а) обозначены: двигатель 1, муфты 2,3, 6, тормоз 4, редуктор 5, барабан 7, полиспаст 9, крюк 10 и дополнительный кабельный барабан 8, который вращается синхронно с грузовым. Кабель 11 питает электропривод или магнит сменных приспособлений, навешиваемых на крюк 10 крана. На схеме механизма передвижения грузовой тележки (рис. 4, б) обозначены: 1 – двигатель, 2 – тормоз, 3 – опорные колеса, 4 – редуктор. По рельсам подкранового пути кран перемещается с помощью привода ходовых приводных тележек. У КДКК-10 все четыре опорные тележки приводные. Каждая из них (рис. 4, в) имеет электродвигатель 1, тормоз 2 типа ТКТГ-200, редуктор 3 и опорные катки 4.
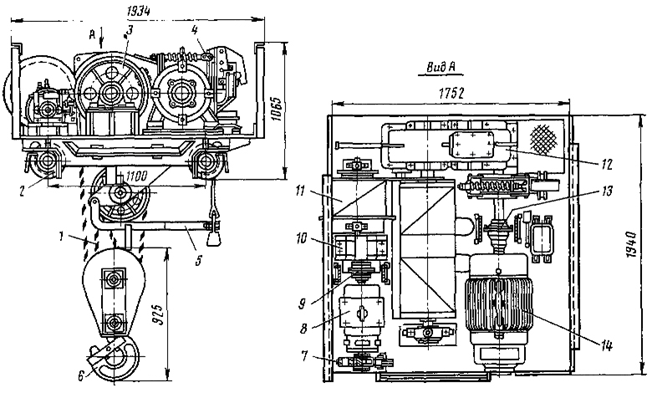
Рис. 3. Грузовая тележка КДКК-10
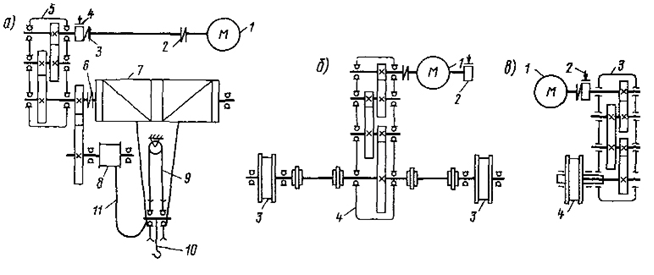
Рис. 4. Кинематические схемы КДКК-10:
а – грузовой лебедки; б – механизма передвижения тележки; в – механизма передвижения крана
Козловой кран грузоподъемностью 5 т типа КД-09 показан на рис. 5. Он состоит из фермы 1, по нижнему поясу которой по двутавровой балке 5 перемещается электроталь (тельфер) 3 с рельсовым звеном 6. Ферма опирается на опоры 2. Питание электродвигателей током осуществляется по троллеям 4, расположенным на стояках вдоль пути передвижения крана. На звеносборочных базах краном обрабатываются пакеты рельсовых звеньев 7 и склады материалов. 8.
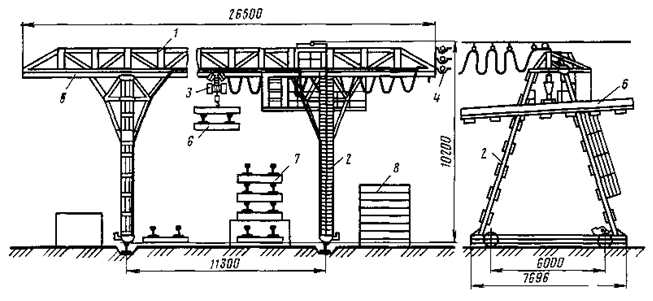
Рис. 5. Козловой кран КД-09 с тельфером
Электротали – это компактные подвесные электрические лебедки с электродвигателем. Их применяют не только как элементы козловых кранов, ной как самостоятельные грузоподъемные механизмы в цехах и мастерских, на складах и базах. Грузоподъемность электроталей по ГОСТ 22584–77 от 0,25 до 5 т.
Основные узлы электротали – корпус, электродвигатель, грузовой барабан, редуктор и тормоз. Корпус подвешивается к самоходной тележке. Электродвигатель может быть встроен в барабан или прикреплен на фланцах сбоку тали. Тали со встроенным двигателем меньше по длине и весу, но у них хуже отводится тепло от двигателя. Корпус электротали подвешивают к балке или тележке. Электротали, подвешенные к самоходной тележке с электрическим приводом, называются тельферами. Скорость их передвижения 20–40 м/мин.
У электротали ТЭ-500 (таль электрическая, грузоподъемность 5 т) со встроенным двигателем электродвигатель 5 (рис. 6, а) размещен внутри барабана 6. Вал двигателя соединен шлицевой муфтой с валом двухступенчатого редуктора 1. Зубчатая пара 21–18 передает вращение на промежуточный вал, установленный на подшипниках 16, откуда зубчатая пара 17–2 – на втулку, соединенную зубчатой муфтой 14 с барабаном 6. Для предохранения электродвигателя от попадания масла из редуктора служит манжетное уплотнение 15. В корпусе редуктора, закрытого крышкой 22, размещены два тормоза: электромагнитный колодочный 23, тормозной шкив которого посажен на первичном валу редуктора, и грузоупорный дисковый 20 на промежуточном валу. Храповое колесо 19 этого тормоза стопорится собачкой. Грузоупорный тормоз действует от веса груза и удерживает его на заданной высоте. Для опускания груза электродвигатель вращают в сторону, обратную подъему. Канат 13 крепится на барабане болтами. К сварному корпусу 3 тали прикреплен шкаф 7 с электроаппаратурой управления талью, в котором размещены пускатели 10 и кольцевой токопровод 9 с проводами 8 для питания электродвигателя 5. Таль подвешивается к тележке на фланцах 4. Управление талью осуществляется из кабины козлового крана или при самостоятельном использовании тали кнопками 12 через кабель 11.
На рис. 6, б представлена кинематическая схема механизма подъема груза электротали, где от двигателя 5 через зубчатые пары 2–7 и 4–3 вращение передается на барабан 6. Механизм имеет колодочный тормоз 1 и упорный 8.
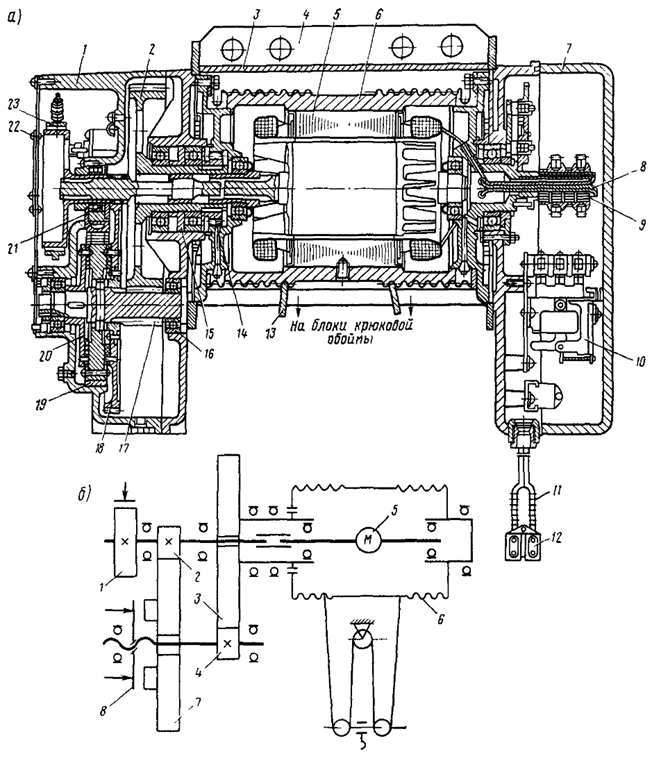
Рис. 6. Тельфер ТЭ-500 со встроенным двигателем:
а – конструкция; б – кинематическая схема
Механизм передвижения тали грузоподъемностью 3 т и менее состоит из приводной и холостой тележек, а тали грузоподъемностью 5 т – из двух приводных тележек. У тех и других тележки соединены между собой траверсой, на которой подвешен механизм подъема. Каждая приводная тележка имеет по два ведущих и два холостых колеса. Первые приводятся в движение электродвигателем через два боковых редуктора. Приводная тележка изображена на рис. 7, а. От электродвигателя 10 зубчатыми колесами 9, 8,7, 6 и 5, 11, 1 вращение передается на колеса 2 и 4, опирающиеся на полки двутавра 3. При установке тележек необходимо следить, чтобы суммарный зазор между ребордами ходовых колес и полкой не превышал 4–6 мм. На рис. 7, б представлена кинематическая схема этой тележки.
В козловом кране грузоподъемностью 5 т (см рис. 5) тельфер 3 перемещается по нижней полке двутавровой балки 5, прикрепленной болтами к нижнему поясу фермы / крана. Это позволяет легко заменять балку в случае износа. Управление механизмами передвижения контроллерное. Питание крановых электродвигателей током может осуществляться по гибкому кабелю, наматываемому при передвижении крана на катушку или по троллеям, расположенным на стойках вдоль пути передвижения крана.
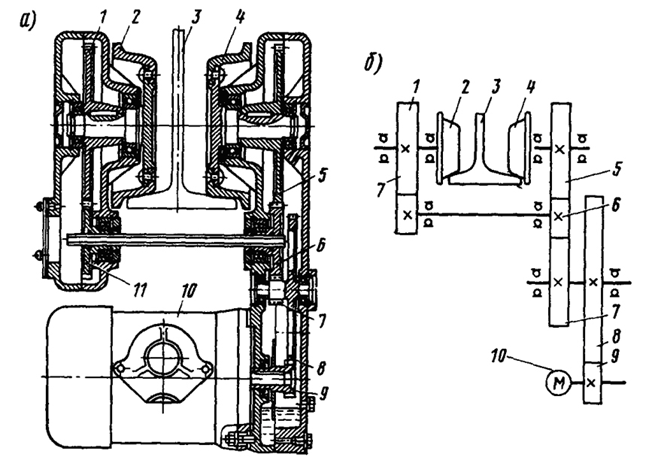
Рис. 7. Приводная тележка тельфера:
а – устройство; б – кинематическая схема
Для кранов КД-05 и КД-09 грузоподъемностью 5 т, используемых в путевом хозяйстве, взамен ранее применявшихся тельферов ТЭ-5-911 разработаны грузовые тележки, перемещающиеся по двутавровой балке крана на двух четырехкатковых тележках. Благодаря этому скорость подъема груза повышена до 0,233 м/с, а передвижения тележки – до 0,66 м/с. Механизм передвижения крана установлен на двух приводных опорных тележках. Каждая из них (рис. 8, а) имеет электродвигатель 3, тормоз 2, редуктор 1 и опорные катки 4.
Козловые краны могут быть самомонтирующиеся или монтируемыми при помощи других передвижных кранов или специальных дополнительных мачт и лебедок. Ферма самомонтирующихся кранов шарнирно соединена с опорами, что позволяет разводить последние в стороны при опускании фермы на землю (демонтаже) и сводить опоры при подъеме фермы вверх, т. е. при установке крана в рабочее положение (монтаже). Стягивание опор и подъем крана осуществляются при помощи полиспаста и механизма, объединенного с механизмом передвижения крана. Для этого имеется канатный барабан 6, который включается кулачковой муфтой 5. При соединении последней со ступицами катка 4 механизм передвижения работает как механизм для самоподъема крана путем стягивания полиспаста 7, одни блоки которого находятся на опорной приводной тележке А крана, а другие 9 – на неприводной опорной тележке Б. При монтаже кранов предварительно устанавливают ферму на землю, а ходовые тележки – на подкрановые пути. Затем опоры соединяют шарнирно с ходовыми тележками и фермой (рис. 8, б, положение I). После этого при помощи кулачковой муфты 5 включают барабан 6 и полиспастом 7 стягивают опоры, поднимая тем самым ферму (положение II). Опоры соединяют штангами или швеллерами.
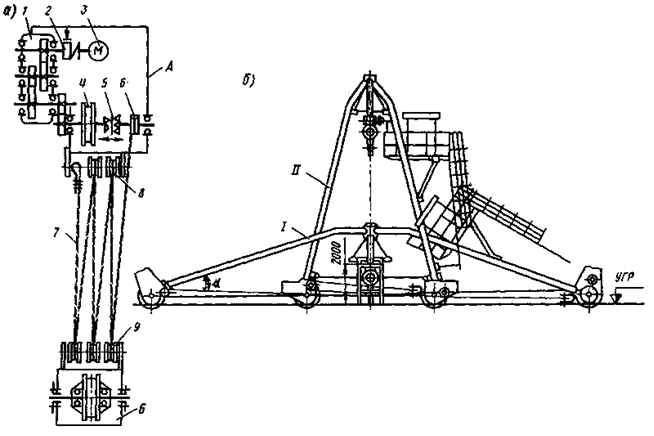
Рис. 8. Схемы:
а – проводной тележки; б – монтажа самомонтирующегося козлового крана
Для монтажа 10-тонных кранов КДКК-10, ККС-10 используют вспомогательные лебедки. Каждый самомонтирующийся козловой кран имеет специальный механизм для поддержания одинакового угла поворота опор при подъеме крана, т. е. предупреждения его перекоса. У 10-тонных кранов опоры соединены рычажным блокировочным механизмом, состоящим из двух рычагов (рис. 9), соединяющих концы опор по принципу параллелограммного устройства. При повороте одной из опор другая, связанная с ней рычагами, должна повернуться на такой же угол.
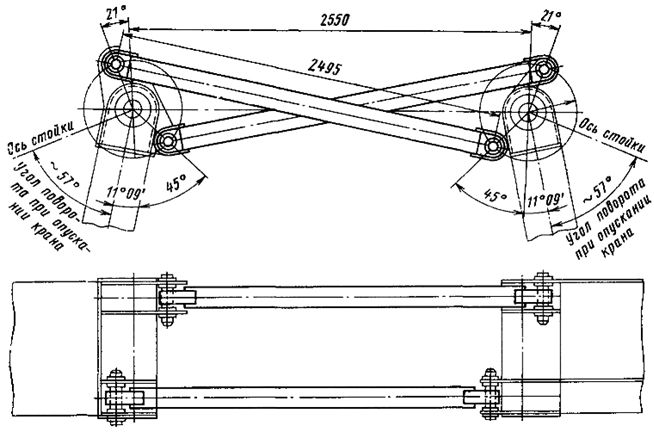
Рис. 9. Рычажное уравнительное устройство для самомонтажа крана КДКК-10
|